4. Eight pilot projects on nature-based solutions in the Nordics
In this chapter we present the eight NBS pilot projects that make up the basis for this report. As noted in the methodology, this is not a comprehensive description or evaluation of the pilot projects, rather an introduction to be able to provide insights relevant towards effective and efficient implementation of NBS in the Nordics.
The information about the projects comes from interviews with the project leaders, in addition to project descriptions and additional material (see Chapter 3). Concerning the primary type of NBS action (s) and the key societal challenge(s) listed for the various pilots in the respective pilot information boxes, these are based on the UNEA NBS definition and societal challenges provided in the IUCN Global NBS framework (see Chapter 2). The pilot projects are also presented, by the Nordic Council of Ministers and/or the pilots themselves, online on the NetworkNature Nordic Hub.
All projects started in 2022 and run between two and three years, the last one terminating in summer 2025 (see Figure 5). The results and experiences presented in this report are therefore of mid-term character and are not final conclusions. An assessment of all projects shortly after they have officially finished and again at a later point in time is highly recommended. This would provide valuable additional insights, e.g., about the robustness of the chosen/built NBS, if and how long-term operation and maintenance of the NBS was achieved, how successful the upscaling of the solutions were.
Pilot project: | 2022 | 2023 | 2024 | 2025 | ||||||||||||
Q1 | Q2 | Q3 | Q4 | Q1 | Q2 | Q3 | Q4 | Q1 | Q2 | Q3 | Q4 | Q1 | Q2 | Q3 | Q4 | |
Pilot 1: More Nature - Less Waste (Denmark) | ||||||||||||||||
Pilot 2: Planning for multifunctional land consolidation (Denmark) | ||||||||||||||||
Pilot 3: Land restoration initiative (Faroe Islands) | ||||||||||||||||
Pilot 4: Stream and watershed restoration in peatland and unproductive forest areas (Finland) | ||||||||||||||||
Pilot 5: Crop wild relative biodiversity in urban green and coastal areas in Reykjavik (Island) | ||||||||||||||||
Pilot 6: Protecting stream banks against erosion (Norway) | ||||||||||||||||
Pilot 7: Floating wetland raft system for treating sea waters (Sweden) | ||||||||||||||||
Pilot 8: Establishing multifunctional wetlands in agricultural areas (Åland) | ||||||||||||||||
Figure 5. Gantt chart showing the duration of the eight NBS pilot projects. Light green cells indicate that the initial official project period has been extended.
4.1 Pilot 1: More Nature – Less Waste with brush fences (Denmark)

Figure 6. Brush fences being filled up at a local school (Photo: Per Bille).
Project name (local language): More Nature – Less Waste (Mere natur - Mindre affald)
Location: Municipalities of Skanderborg and Odder, Denmark
Duration: 1 January 2022–31 December 2023/extended until end of 2024
Project leader: renosyd
Involved actors: The public waste management company renosyd, the two municipalities Skanderborg and Odder (that owns the waste management company), and 25 schools and 29 villages and organizations.
The project is a part of a larger cooperation with EU LIFE IP - Circular Economy Beyond Waste
Budget: 1,500,000 DKK (900,000 DKK NCM contribution)
Website: renosyd.dk/kvashegn
Primary type of NBS action: Sustainable use and management of natural resources
Key societal challenge(s) aimed to address: Climate change mitigation, Environmental degradation and biodiversity loss, Economic and social development (waste, resource use circular economy).
4.1.1 Background, concept and status
Aims: The project More Nature – Less Waste focuses on reuse and recycling of garden waste by building brush fences (see Figure 6). The pilot has three equally important objectives:
- Reducing waste, going from waste to value
- More biodiversity in urban areas
- Creating local communities around waste and the green transition
Challenge: The waste produced per capita in Skanderborg and Odder is increasing, and around 23 per cent of this is garden waste. The background for the pilot is a need to reduce the resources spent on handling and transport of this waste to the waste management company, in addition to building consciousness around how we as humans view waste and resources.
Concept: The concept is to engage school children and local communities in creating brush fences out of garden waste consisting of old branches and twigs. By reusing these materials locally, the amount of garden waste that transported to the recycling center is reduced. A brush fence is created by poles in two parallel rows where branches and twigs are placed between the poles (see Figure 7). The idea is also that the brush fences provide habitats for insects, birds, small animals and decomposing animals, which contribute to improving urban biodiversity. The solution can also reduce CO2-emissions as the garden waste can be managed locally instead of transported by citizens in cars and handled by the waste company in trucks and composted.
The locations and placement of the brush fences in this pilot has been on school and on private and municipal properties. In addition to being able to handle local branch clippings and brushwood, the brush fences at schools should also contribute to schoolchildren's learning about animals, plants and human interaction with nature. To enable this, various communication material and animation videos have been produced as part of the work, as well as an educational programme for the pupils is due in April 2024.


Figure 7. Brush fences before (left) and after (right) filled with branches and garden waste at the Knudsøskolen (elementary school). The width is typically 1,5 meter and height 1,2–1,7 meter. The poles are embedded 1 meter in the ground for the stability of the filled fence (Photos: renosyd).
Activities within the project:
- Agreement on locations and ownership of the brush fences. In this phase, the project leader worked on contacting collaboration partners and selected target groups to identify and obtain locations where the brush fences would be built. Extensive outreach activities were carried out with dialogue, meetings and marketing of brush fences to ensure sufficient commitment to implement and maintain the brush fences over their lifespan. The typical lifespan of a brush fence is 30 years. Inspections were also carried out to find the most suitable placements. In 2022 the brush fences were built on school sites and in 2023 built on various and diverse sites, owned by both private and by the municipality. All participants took part in the project voluntarily.
- Preparations for the brush fences to be implemented. This phase included obtaining necessary approvals and preparing the brush fence for it to be filled with garden waste, by purchasing and placing the posts. For the pilot, the project provided the poles and installed them at the sites, as part of both making sure that it is done in a robust way, making sure not to damage any underground structures e.g., water pipes, and making it easy for the schools, pupils and the local community to contribute with garden waste.
- Implement 4500 m3 (2 km) brush fences in Odder and Skanderborg (initial original target). This included engaging the local community in filling the brush fences with garden waste. An important component was also developing information material and targeted marketing to engage citizens in the two municipalities. The information included storytelling about garden waste as a resource and information about the brush fences and how to fill them.
- Document the effects of brush fences on biodiversity in urban areas and reducing waste production while increasing carbon capture and reducing carbon emissions from waste transport and treatment.
- Develop systematic methods for implementing brush fences at a larger scale. Qualitative and quantitative outputs of the project will be synthesized in methods and recommendations.
Status: In the first phase of the project, a lot of groundwork took place in preparing for the locations and actors to be involved in the establishment of the brush fences. The infrastructure for the brush fences was put in place and garden waste has been delivered by citizens to the 21 schools where fences were constructed. This was kicked off in May 2022. The second phase has been about expanding the construction and use of such brush fences to other local communities, villages and landowners. As of end of October 2023, the project has established in total 2,5 km (6475 m3) of 70 brush fences at 54 locations across Odder and Skanderborg. This achievement surpasses the original target of 4,500 m3 of brush fences.
4.1.2 Organisation and involvement
The More Nature – Less Waste pilot project is an initiative by the public waste management company rrenosyd, which is owned by the two municipalities Skanderborg and Odder. The project involves civil society in building brush fences, while the fence owners and municipalities will be responsible for maintenance. At start up, the project team targeted two major groups: Schools in 2022, and local and green communities in 2023. To reach individual citizens and achieve broad outreach, efforts were made to carry out the project in cooperation with groups (schools and local green communities) that they presumed would be or already was engaged in green transition. Senior scientists at Aarhus University are involved in the evaluation of biodiversity aspects in the project.
The brush fence pilot is also one of several initiatives that Renosyd have included in the LIFE IP Circular Economy Beyond Waste initiative funded by the European Commission.
Communication: The project has been well received locally and had extensive media coverage. Its goals and outcomes are effectively communicated through visual materials as a way of showing the progress and effects of the pilot activities. The project has created communication materials tailored to diverse audiences, with a focus on younger individuals. These materials include explanatory videos and other visual resources designed to enhance learning about natural resources and garden waste (see Figure 8 and Figure 9).
Figure 8. Example of how the project has presented and conveyed results. Here results by November 2023 (source: renosyd).

Figure 9. The project has made an explainer video about the project topic targeting children (source: screenshot of animation video by renosyd).
The most demanding aspect, according to the project leader, has been the participation, coordination, and engagement of various stakeholder groups and interests. Working with new partners and forging partnerships requires a significant amount of effort, adaptability and communication time. However, this has also been key to the project reaching its goals. This achievement was realized through proactive and strategic collaboration, as well as “bridge-building”, between the involved organizations (local communities, municipalities etc.). The project leader reflected on the fact that there are limits to how far the waste company can extend its activities, when their primary activity is handling waste. To go beyond that requires extra funding and engagement from other people.
For the development of the learning and education materials, the project has worked with education professionals from a “learning house”. The experts have been working with selected teachers to develop the learning material that they aim to further develop into an educational program. The project leader hopes to secure further funding to upscale the learning program after this first volume.
4.1.3 Effects of the NBS intervention – monitoring
The project leader has engaged University of Aarhus (Institute for Ecoscience) to study and report on the biodiversity in the brush fences. The report, due by end of 2023, is to report on how and how much biodiversity has increased or changed due to the brush fences and which methods have been used for the documentation. The idea is also to engage the schools in the biodiversity surveys at the established fences.
The scientists have discovered that the fences attract bumble bees. Preliminary results indicate that the density of bumblebee nests was higher than previously recorded for other favourable habitats (earth and stone dykes, hedgerows). In addition, spiders and birds have been observed using the brush fences and a decomposer fauna has developed on the soil surface, including ground beetles and millipedes. A question the project leader has been asked a lot is whether the fences will attract rats. The observations show this has not been an issue and the scientists have pointed out that the rats mainly comes when there is something that they can eat and that the fences do not provide an attractive food source to them.
Besides documenting biodiversity-related effects for this specific pilot, the project leader also sees this reporting as an important for informing further initiatives. It has the potential to serve as a template and inspiration in relation to NBS and how to document effects. The project leader also believes that the documentation can support public sector employees or others, such as e.g., green neighboring communities, who want to see such an idea adopted in their municipality and local area.
4.1.4 Next steps and potential for upscaling
The pilot has received a lot of media attention and many municipalities have expressed their interest in doing something similar. Furthermore, the collaboration with NCM has enabled collaboration with scientists and lead to dissemination materials such a book, master classes, teaching politicians and more.
In its last phase, the project is now focusing on how brush fences can be spread to other municipalities. As of autumn 2023, there are 12 other municipalities in Denmark that have either adopted or are in the process of adopting the concept of building brush fences in their local communities. The project is also developing guidance on how to co-create such solutions together with citizens and other actors, based on the pilot experiences.
The project leader also reflected that it is now, as the pilot enters its final phase, that the process of harvesting experiences and synthesizing results into reports on biodiversity, co-creation, and other aspects is coming to fruition. The project has engaged an expert
4.1.5 Key lessons learnt and reflections relevant for nature-based solution projects
- Building a compelling narrative about the project, already before there are actual outcomes to show, has been key for the pilot project to create interest and support.
- Emphasizing positive expected outcomes, defining clear goals and establishing a win-win agenda across actors have been important for building partnerships and collaboration. While it may be time-consuming, the potential impact is significant.
- Acknowledge that a bit of frustration is part of the process. Given the often dynamic nature of multi-actor initiatives, the project leader reflected that this is only natural. Time is a critical factor, and while maintaining momentum, accepting that things take time is also part of the process. Leadership support is essential when navigating through such challenges.
- Providing people with opportunities to contribute is important. The project experienced a genuine desire among citizens to act and “do good things”. Facilitating this involvement is crucial, and a focus should be on understanding what it takes to engage citizens effectively.
- Meticulous planning and preparations have been fundamental for the project to reach its goals, such as awareness raising about NBS and involving the local communities in the activities.
4.2 Pilot 2: Planning for multifunctional land consolidation (Denmark)

Figure 10. The Holmehave area (Photo: Troels Kærgaard Bjerre, VandCenter Syd).
Project name (local language): Strategic plan for Holmehave (Strategisk helhedsplan for Holmehave)
Location: Assens, Denmark
Duration: 1 February 2022–31 December 2023
Project leader: Assens Municipality
Involved actors: Assens Municipality (project leader), Hedeselskabet (an association working with long-term development, use and protection of nature), VandCenter Syd (VCS) Denmark (water and wastewater utility), University of Copenhagen, local landowners.
Budget: Total 1,040,000 DKK (890,000 DKK, NCM contribution)
Primary type of NBS action: Restoration, Sustainable use and management of terrestrial and freshwater ecosystems
Key societal challenge(s) aimed to address: Environmental degradation and biodiversity loss, Climate change mitigation and adaptation, Water security.
4.2.1 Background, concept and status
Aims: The aim of the Holmehave nature project is to convert around 500 hectares of currently cultivated agricultural land to forest and nature areas, and to establish a new wetland of 150 hectares close to these areas (see Figure 10).
Challenge: Land use pressures and the need to accommodate many land use types and competing land use interests, within a constrained area, is increasingly challenging. Balancing the needs for nature protection, enhanced biodiversity, urban development, infrastructure and food production requires multifunctional land use. However, much of current land use is monofunctional, necessitating a shift towards multifunctionality to accommodate the varied needs. Achieving comprehensive land use change and land use management calls for improved collaborative approaches to find effective solutions to the multifaceted societal challenges.
Concept: The Holmehave project area of about 800 hectares is located between Odense and Assens. Through multi-functional land consolidation, the goal is to create a nature area of up to 500 hectares, where 300 hectares will be acquired for afforestation and 150 hectares will be converted to wetlands. This involves, first and foremost, multifunctional land consolidation to pave the way for wetlands and afforestation in close cooperation with the landowners. The terrain in the area is very varied, but the majority of the area is intensively cultivated with small areas of forests and bogs. Assens Municipality has also implemented a wetland initiative that will be further developed during the project period.

Figure 11. Multifunctional land consolidation is a jigsaw of various components and land use components and needs (source: Danish Agricultural Agency).
During 2021–22, the Danish Agricultural Agency had a call for pilot projects on multi-functional land consolidation (Figure 11),
Status: In the first phase of the project, planning the involvement of local landowners and citizens was a key focus. The first public meeting about the strategic master plan for the Holmehave area was held in October 2022, followed by several workshops. As of October 2023, the strategic masterplan for Holmehave is finalised (Figure 12); It has been through internal review with the strategy group, and subsequently, it has been politically processed and approved. It is now going for external review (with all citizens, etc.) and an open house event will be held during this phase, so that everyone interested can come, learn more, and ask questions. This review will take place in December 2023 and January 2024.
Furthermore, during late autumn 2023, land consolidation has actually taken place in the Holmehave area. Forty landowners have agreed to change ownership, buy and sell a total of 600 hectares of land to create approximately 300 ha of space for the Holmehave Nature Project and the agreed new forest and wetland areas as envisioned in the strategic master plan.

Figure 12. Screenshot of the front page of the strategic master plan and an example from the working document (source: Assens Municipality).
4.2.2 Organisation and involvement
The Holmehave project is carried out as a partnership, with tasks divided amongst various organisations. Assens Municipality is responsible for the overall project management and leads the wetland restoration (target 3). Hedeselskabet leads the afforestation target (target 2), and the University of Copenhagen leads the strategic plan for Holmehave (target 1). All the actors also participate in the targets they are not leading. Civil society and NGOs are also strongly engaged in the development of the strategic plan for Holmehave (target 1). Stakeholders are involved through meetings and workshops. Stakeholders were involved very early in the process, before important decisions had been made about the land use in the area, to avoid conflicts of interest.
The development of the strategic master plan has involved many meetings and workshops, both out in the field and indoors (see Figure 13). A strategic working group was established, consisting of citizens and stakeholders from the area. The plan has during summer 2023 been on a consultation with this group, which was involved in preparing the master plan to receive the last feedback before finalisation. It was then shared and anchored with the politicians in the Municipality.
The project leader reflects that there is now a citizen-driven, landowner-driven plan, about which there is consensus and which the politicians support. A key factor enabling this achievement has been that the funding for land acquisition and implementation of measures was in place before the start of the collaborative planning process. This was important, according to the project leader, because it made the project real and tangible and respected people’s time and effort by not asking them to take part in a fanciful project. It's not just about visions or dreams; the emphasis is on planning something genuinely achievable that can actually be implemented.

Figure 13. The strategic group out in the field working with the co-development of the plan for the area (Photo: Troels Kærgaard Bjerre, VandCenter Syd).
In multifunctional land consolidation, agricultural areas are taken out of use to make room for nature, improve the state of the environment and give citizens access to and improved recreational opportunities in the open countryside. Land distribution is solved as a jigsaw puzzle among the area's landowners, where participants buy and sell land simultaneously. As a result, landowners who let land go out of production are offered agricultural land as compensation and for participating landowners, the goal is to consolidate their fields into larger blocks or in locations that make sense for their farm.
The project has benefitted from several financing schemes and policies, besides the funding from the NCM, namely EU-funding for wetland restoration, which is a monofunctional scheme according to the project leader, and the national government funds for multifunctional land consolidation. There are major groundwater interests in the project area, and a partnership has been formed to find solutions that utilise potential synergies. For example, Holmehave has Denmark's largest groundwater reservoir, which can supply up to half of all the water for VCS Denmark consumers in Odense, Denmark’s third largest city. Solutions that protect groundwater are therefore vitally important. In close cooperation with the landowners, land use synergies have been developed through the process of land use consolidation, which will allow wetland restoration and afforestation. The land consolidation has been carried out with assistance from the Danish Agricultural Agency via the subsidy programme for multifunctional land consolidation, as well as the wetland schemes.
The responsibility for maintenance of afforestation in the Holmehave project area lies with Hedeselskabet. Landowners will be responsible for maintaining the wetland area, and it is the landowner’s responsibility to adhere to the requirements specified by the support schemes. In addition, the municipality can make individual agreements that support NBS. That's why they have aimed at finding a 'common starting point' for future land use through the three project activities, especially through target 1 – the strategic plan for Holmehave.
4.2.3 Effects of the NBS intervention – monitoring
For the impact of the co-created strategic masterplan for Holmehave, evidence of success is that 300 hectares have been made available for NBS, including wetlands and afforestation through multifunctional land consolidation. This is quite unique, according to the project leader. Many landowners, typically farmers, are interested in contributing to the collective effort. However, the process is complicated, involving meetings with several actors and includes land negotiations. The principle of voluntariness in multifunctional land consolidation can be challenging because local considerations, private interests and political ambitions need to come together and find common ground. The planning and involvement of landowners and citizens has been the most challenging task as well as being an absolutely crucial part of the Holmehave project.
The goal is that the afforestation and rewilding of natural areas and the establishment of the wetland will benefit groundwater protection, improve water quality, increase biodiversity and reduce CO2 and nitrogen emissions. Additional funds are required to monitor the implemented measures, so extra funding would be needed beyond the project period for this.
4.2.4 Next steps and potential for upscaling
The Holmehave project area can be seen as a microcosm of the challenges in the open countryside; it is described by the project leader as a large nature project in a landscape where space is limited. With a politically accepted strategic masterplan and with multifunctional land consolidations taking place, the Holmehave project is an example of how challenges can be translated into local action. According to the project leader, the pilot project has been very positively received by local politicians, and the topic is of national interest, which has also helped the process at the local level.
The multi-functional land use consolidation program from the government was a pilot scheme during 2020–21 and has been discontinued. According to the project leader it was expected to continue, but reportedly there have been few results thus far. The Holmehave project has been one of the successful projects, succeeding in making multi-functional land consolidation.
Multifunctional land consolidation can ensure collective landscape planning and broad, local support to meet societal challenges through NBS such as wetland restoration. However, no land changes can be made without landowner agreement. Such projects require collaboration between all parties. Therefore, an important part of future multifunctional land consolidation is establishing models for how this can be best achieved. The ‘Assens method’ springs out of the work done in Assens Municipality, including the work done by the partners within the Holmehave pilot, as an approach to develop a strategic land use plan together with the local people. The method has the potential to be adopted by and used in other municipalities.
4.2.5 Key lessons learnt and reflections relevant for nature-based solution projects
- Securing funding for the implementation of physical measures and other actions before starting the collaborative planning for the area has been crucial. The project experienced that it made the process of developing the strategic master plan more meaningful and tangible, and it also created commitment among actors involved.
- Involving the landowners first, and then other citizens, before starting the spatial planning of the area is a central strategy in multifunctional land use projects. Whether a small wetland project or a larger-scale landscape project, stakeholders should be involved before the area planning and design starts. The content and details of the process might vary, but the sequence is crucial.
- Leadership in collaborative planning processes requires an open mind, stress endurance, and the ability to engage in dialogue with diverse opinions. In particular, when involving many actors, citizens and other stakeholders, the project should start by asking many questions, rather than coming with predefined answers. As experienced by the project leader, it is rewarding, yet hard work. It required significant personal investment, meaning this role is not suitable for everyone.
- Enabling mechanisms supporting diversity instead of mono-functionality is highlighted by the project leader as necessary to truly establish multifunctional landscapes. This includes funding sources like the governmental multifunctional land use consolidation program, together with meaningful processes for collaborative planning, as has been tested in this pilot.
4.3 Pilot 3: Land restoration initative (the Faroe Islands)

Figure 14. The pilot project in the Faroe Islands as part of the activities develops and implements nature restoration measures for a landslide located on the island of Kalsoy (Photo: Tjóðsavnið).
Project name (local language): The First Large Land Restoration Initiative in The Faroe Islands (Lendisbati)
Location: The Faroe Islands
Duration: 1 May 2022–1 May 2025
Project leader: Tjóðsavnið (the Faroe Islands National Museum)
Involved actors: Tjóðsavnið (the Faroe Islands National Museum), NIBIO (The Norwegian Institute of Bioeconomy Research), Landgræðslan (the soil conservation service of Iceland), Gróðurstøðin (plant nursery station), Vestmanna high school (rector and students), local farmers.
Budget: 1,005,300 DKK (800 000 DKK, NCM contribution)
Type of NBS action: Restoration, Sustainable use and management of terrestrial ecosystems
Key societal challenge(s) addressed: Environmental degradation and biodiversity loss, Climate change mitigation and adaptation.
4.3.1 Background, concept and status
Aim: The project aims to work towards restoring the degraded landscapes in the Faroe Islands, with a focus on preventing soil erosion and improving biodiversity, as well as restoring wetlands for carbon storage. As this pilot project is the first large-scale land restoration project in the Faroe Islands, the goal is to test different approaches and measures appropriate to Faroese conditions, to increase knowledge and enable future restoration projects in the country. Specifically, the pilot project develops and implements nature restoration measures for a landslide located on the island of Kalsoy (see Figure 14). The location was picked as the local farmer and landowner in this area is very interested in collaboration for restoration and to prevent erosion of agricultural land. There is also a second test area in a field that was previously grazed by sheep, but which is now fenced off, so that the project can monitor any changes here.
Challenge: Erosion is a common problem in the Faroe Islands, that will likely increase due to climate change, increasing precipitation and wind. The harsh climate in the region also continuously impacts the land. Although humans have always been closely attached to nature in the Faroe Islands, there is a need to increase understanding and consideration towards the sustainability of natural resources. Animal life and plant life are at risk because human activities do not always take nature into consideration. The purpose of the pilot project Lendisbati is to improve these conditions.
The experiences from the pilot will be the basis for other projects to reduce and prevent environmental degradation. The pilot also aims for social interaction, inclusion and learning by involving the local community. The pilot includes efforts to raise general awareness about soil erosion, biodiversity loss and nature restoration, by including students in field work and in the development of educational material. In the future, the initiative also aims to restore wetlands. This will happen after the pilot project period.
Status: In the first phase of the project, the landslide area at Kalsoy was fenced off to prevent sheep from grazing there. The pilot conducted a baseline assessment to be able to compare and assess the results of the restoration. During the summer 2022, the first botanical sampling was conducted, and vegetation mapping has continued in 2023 and will also be done in 2024.
Nature restoration experts from the Icelandic institute Landgræðslan visited the site of the landslide in august 2022 to contribute to a plan for the restoration measures at Kalsoy. The Norwegian Institute of Bioeconomy Research (NIBIO) came to study the test field and map its vegetation in august 2023. In September 2023, restoration activities started in the landslide area. With the help of high school students, the edges of the landslide were treated with different methods for stabilisation to prevent the landslide from expanding. There was also an area where the edges were just evened out to control for any differences. So far, the efforts to restore the landslide area at Kalsoy have shown that the work needs to start from the top of the affected area and work downwards to prevent further erosion and also potential risks when working on the site. The area is very steep with a lot of debris. The restoration efforts are therefore focussing on the edges in the first phase, leaving the barren area as it is but monitoring any changes. The pilot collaborates with experts from other countries but is conscious about local conditions. By digging and adding different materials such as wool, hay and seeds, the pilot project is testing what works best to facilitate new growth in the landslide test area. The seeds are for 3–4 typical local grass-types that have been collected in the area by students. When testing out the different methods, the pilot will also learn more about practical issues such as how many people, how much materials, equipment, and time is needed. The final restoration activities are planned for the summer of 2024. when the different methods will be applied to the landslide area with control areas as an experiment. The results will be monitored for at least two more years.
4.3.2 Organisation and involvement
Organisation: The pilot is initiated and led by Tjóðsavnið, the Faroe Islands National Museum. It involves collaboration with several partners: NIBIO (The Norwegian Institute of Bioeconomy Research) is responsible for mapping the vegetation in the area. They are also involved in developing the restoration measures together with Landgræðslan (the soil conservation service of Iceland, SCSI). The plant nursery station Gróðurstøðin contributes with native grass and plant species for the restoration measures. Vestmanna high school is involving students in carrying out the restoration measures and future monitoring of the area. A local farmer is responsible for building and maintaining the fence for the area around the land slide and is also involved in the implementation of the restoration measures. It was highlighted that a good working group with different competences has been very important.
Involvement: The pilot has signed a 10-year contract with the farmers included in the project for use of their land for testing that may be extended further. The project has deliberately designed the pilot work as a collaboration with farmers and landowners to avoid conflicts. Some of the farmers, have already tried local experiments to regreen areas with new vegetation, but the use of non-native seeds in such initiatives has been a challenge. The pilot has encountered some challenges with landownership and permits, it takes time and effort to get in place. In some areas, farmers own the land, in other areas it is owned by the state and in some cases, there is a “co-ownership” where farmers rent the land long-term from the agricultural agency.
The students in Vestmanna high school have been a central part of the project, with participation in the restoration activities as an integrated part of a class on resource management. The students have been involved in the project since the beginning and have also been interviewed in the local news about it. During the summer of 2023, the project arranged a “Lendisbati day” with the high school students and a biology class from another school in Klaksvík visiting the site, which included both lectures and practical work on the edges of the landslide. Local inhabitants and farmers have also been invited to the restoration activities and lectures together with the students. There is also a Facebook group where news about project activities is posted. The project plans to involve both students and the local farmer even more in 2024.


Figure 15. Lendisbati day during summer of 2023 (Photos: Tjóðsavnið).
Communication: The project has communicated about the activities actively in the media and plans to present results to the public and NGOs at a conference at the end of the project period. The pilot project manager has also networked with other actors through conferences and meetings on NBS abroad. The project has received attention in the local news media and on social media, and has found that information spreads easily since the Faroe Islands is a small country.
The project leader found that the most effective way of communicating is “show, don’t tell” and raise awareness by demonstrating and explaining why they do what they do. It was also reasoned that restoring a landslide is something people can easily understand as they can see the “wound” in the landscape and it may therefore be easier to communicate than restoration of a wetland. The idea has been to start with landslides as it is a tangible visible challenge in the landscape as a way to start the conversation and actions on how to better manage the land.
4.3.3 Effects of the NBS intervention – monitoring
The landslide area has been documented by drone images that have also been used to create a 3D model to be used for long-term monitoring of succession of the vegetation. The Norwegian institute NIBIO has helped with vegetation mapping before the intervention so the project can follow the development.
Monitoring will continue after the pilot period ends through annual drone photos and measuring the percentage of vegetation cover. The funding for monitoring and maintenance is not clear yet, but it the project leader foresee that it will be part of the museum activities and say that they will definitely find time within the activities to go and monitor the landslide once a year. Monitoring of effects will also continue to be carried out by students.
4.3.4 Next steps and potential for upscaling
The restoration actions have been tested in smaller scale and will be further implemented through a larger scale final restoration of the area in 2024. The pilot project is planning to arrange a conference at the end of the project where the involved actors, including students, will present the project and results.
The external funding has been instrumental for the project’s existence, as it is the first large land restoration initiative in the Faroe Islands. The Lendisbati initiative aims to continue beyond the pilot project period funded by the NCM. The pilot leader also talked about possibilities for making a user manual or guidance for restoration of landslide areas and is hoping that other similar initiatives will ask the Lendisbati initiative for advice in the future. Another potential area for upscaling and expansion of the initiative involves analyzing the soil at new sites before restoration to better understand the conditions for new seeds and plants.
The national museum who leads the pilot is working on four areas for restoration in total. They are also planning to further extend the areas restored with funding from private sector actors and/or nature funds. There is already funding granted from the Faroese ministry of environment to fence off another field area from grazing. The agricultural fund in the Faroe Islands has also contributed to the landslide restoration and student activities. In the future, the Lendisbati initiative wants to expand activities to also include wetland restoration in the Faroe Islands. The project will continue to apply for funding from different grants, and there is hope that the government may also support the initiative in the future.
4.3.5 Key lessons learnt and reflections relevant for nature-based solution projects
- Farmers and the agricultural agency are important stakeholders in the Faroe Islands, and important to involve from the start in land restoration projects. It has been key for the success of the pilot to raise awareness and create acceptance of the need for action among key actors before the actual on-site restoration began. Collaborating with farmers has been a positive experience and the farmers also spread the word about the project in other arenas.
- Working by a “show, don’t tell” approach has been beneficial for the pilot. Rather than telling people what to do, demonstrating results as well as how to restore the land in practice brings the topic to life and can motivate others to join. The project leader is optimistic that the visible greening of the landslide area in the future, will show the purpose of the intervention.
- It is important not to underestimate the planning phase. The pilot project experienced that paperwork and permits may take a long time and recommends starting such processes as early as possible.
- Close collaboration with international experts and institutions to learn about methods, approaches, and network with like-minded individuals has been crucial for the project due to a very small team and to overcome challenges with hiring.
- Adapting advice and implementation examples to local conditions, such as varying soil types and the protection of native species, is essential when exploring approaches and methods from other regions.
4.4 Pilot 4: Stream and watershed restoration in peatland and unproductive forest areas (Finland)

Figure 16. A filled ditch at the edge of a restored peatland (Photo: Antti Karppinen, Metsähallitus' Wildlife Service of Finland).
Project name (local language): Mätäsoja Stream and Watershed Restoration Pilot Project (NbS Mätäsoja – Mätäsojan ja valuma-alueen ennallistamisprojekti)
Location: Taivalkoski in Northern Ostrobothnia, Finland
Duration: 1 June 2022–31 December 2024
Project leader: Metsähallitus Wildlife Service of Finland
Involved actors: Metsähallitus Wildlife Service of Finland, Metsähallitus Forestry Ltd., The University of Oulu, Natural Resources Institute Finland (Luke), Jurmu II membership of the local fishing area, local landowners, excavation contractor.
Budget: Total 615,000 DKK (499,000 DKK, NCM contribution)
Main type of NBS action: restoration, protection, conservation, sustainable use and management of terrestrial and freshwater ecosystems
Key societal challenge(s) aimed to address: Environmental degradation and biodiversity loss, Climate change mitigation and adaptation.
4.4.1 Concept, background and status
Aim: The aim of the pilot project is to restore the Mätäsoja stream and watershed near Taivalkoski municipality in Northern Ostrobothnia region, Finland. The pilot will carry out stream restoration together with restoration of the peatland and unproductive forest land in the watershed area (see Figure 16). The project aims to improve the region’s biodiversity, by improving conditions for habitats and species, including game and salmonid fish species, and as well to mitigate climate change by improving carbon storage in the restored peatlands.
Challenge: Reversing biodiversity loss, both at the global and local scale, is the starting point of the project. Establishing protected areas alone is not enough to halt biodiversity loss, and the project sees a need for a more ambitious restoration of nature. Nature regulates the climate. The restoration and protection of wetlands, peatlands, and small-water ecosystems as well as sustainable forest management are essential for reducing emissions and adapting to climate change.
Peatlands are important carbon-rich ecosystems, and the pilot project aims to help the partially destroyed and degraded nature in the Mätäsoja watershed area (see Figure 17) recover from the adverse effects of human activities and limit the fragmentation and destruction of habitats. Using ditches to drain peatlands degrades the natural state of the habitat and lowers the water table. Due to ditches, the natural forest structures of the peatlands have changed as the initially open peatlands have become swampy, tree growth patterns and the condition of the original peatland species and their habitats has been severely degraded. The draining of the peatland was done for forestry approximately during the years 1950-1970. The project leader further explained that many of the drainages have not been successful from a forestry point of view, so some of the areas have become unproductive or poorly productive forest lands.
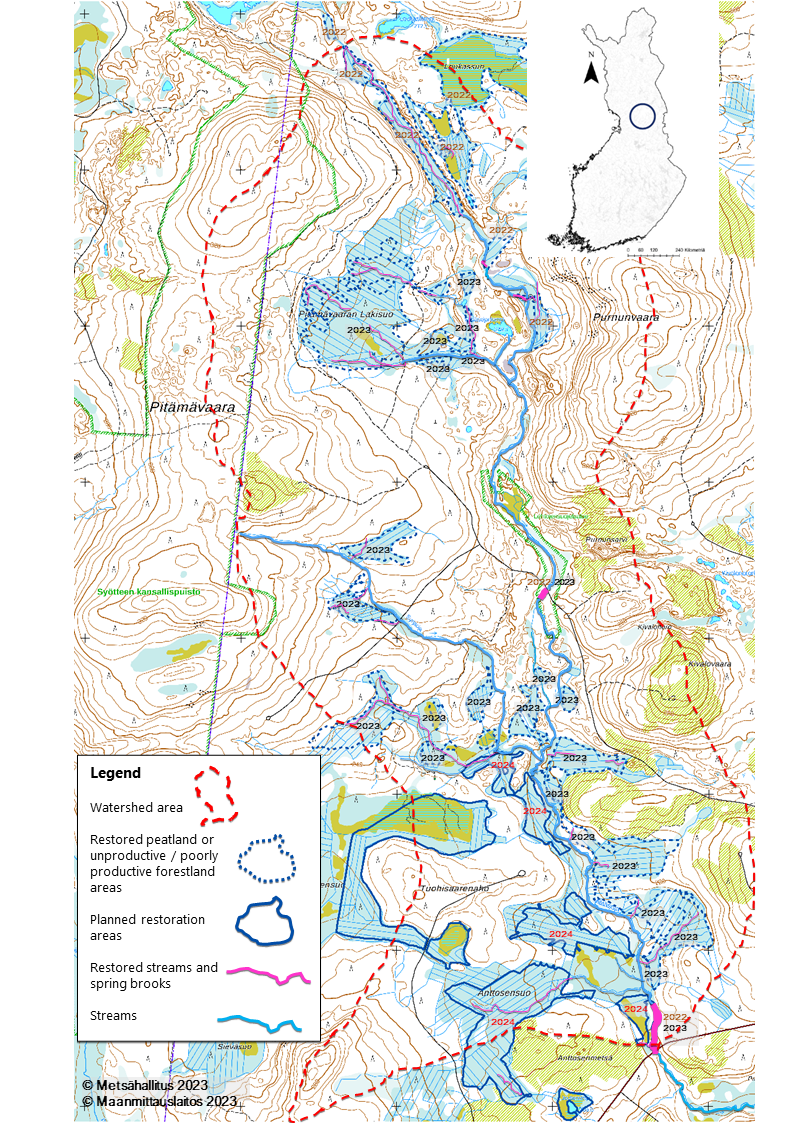
Figure 17. Map of the Mätäsoja stream and restored areas. Red dashed line = the watershed of Mätäsoja stream. Dark blue dashed areas = restored peatland and unproductive/poorly productive forestland target areas. Dark blue areas = planned peatland/unproductive forestland restoration areas. Pink lines = restored stream/spring brook areas. Brown color= restored 2022. Black color = restored 2023. Red color = will be restored 2024. Source: Map and information by Metsähallitus, Base map by Land Surveying Office.
Finland is increasingly restoring ditched peatlands and unproductive forest. However, according to the project leader restoration work covering the entire watershed area of a stream has not been carried out much before in Finland. Monitoring the effects of peatland restoration has yet to study the function and diversity of the water ecosystem in streams.
Concept: With the restoration of the Mätäsoja stream and watershed area (15,79 km2), the pilot aims to cover the entire watershed area within the project period. The restored areas will become part of a regional ecological network of protected areas,
Protected areas are areas to conserve the unique features and diversity of Finnish nature as a part of an international network, https://www.metsa.fi/en/nature-and-heritage/network-of-protected-areas/
Key project activities are:
- Restore 170 hectares of peatlands and poorly productive and unproductive forest land and 5 km of streams in the Mätäsoja watershed,
- Develop monitoring methods for streams, together with research organisations,
- Share best practices of watershed restoration as a nature-based solution based on the project experiences.
Status: During the first phase of the project, steps were taken to involve local stakeholders and to enter into contracts with local landowners for permission to implement the restoration activities on their land. The restoration itself started in October 2022 and is planned to be completed by the end of 2024. The project has carried out pre-investigations to be able to monitor the effects of restoration implementation in cooperation with the University of Oulu and Natural Resources Institute Finland (Luke). Before the implementation of the restoration measures, photos and videos were recorded to document the area. Other early monitoring actions, such as electrofishing and biological and chemical monitoring, have also been carried out by the research partners.
There were already restoration plans for the area in place prior to initiating this pilot project. The plans were finalized and supplemented at the beginning of the project. The project leader had learned a key lesson in a previous restoration project concerning the importance of dedicating time for the planning of the restoration, including cost estimates and time requirements, to achieve success within a limited timeframe. In the previous project, the timeframe for the restoration was only two years in total and the project did not reach all the targets because of the time taken for planning. According to the project leader, it is not possible to take into account the uncertainties of the various restoration activities’ phases, such as weather conditions and contractor availability over a short timeframe.
As of October 2023, the pilot project had restored 131 hectares of peatland (22 peatland areas, 50 springs, 6.9 km of stream/spring brooks, and made 28 gravel beds in the streams for brown trout spawning habitat. This means the project has exceeded the restoration targets set for streams and springs. The project is carrying out implementation activities following best practice using peatland restoration knowledge gained from over 30 years of experience within Metsähallitus Parks and Wildlife. In this project, they combine peatland restoration and stream restoration which is carried out in combination in the same area.
During the process of restoring the peatland area, the contractor uses an excavator to allow water back into the channels of old, dried-up spring brooks, by digging out the channels, removing blockages, or reshaping the land to allow water to flow back into former brook paths (See Figure 18). There are several springs and spring brook channels in the Mätäsoja watershed area. Because of ditching the peatland, also their state has degraded. So, when restoring the peatland areas where also spring brooks needs to be restored, the contractor is focusing also rewatering the spring brooks channels while filling the ditches. For the stream restoration, the project added more large wood, boulders and rocks and salmonid spawning habitats to the streams. This project has been using the Hartijoki method,
Through tree-felling management, the project is trying to restore the natural state of the peatland's forest structure that was present before the ditches were made a few decades ago. Some tree-felling needs to be done before the excavator can start to fill the ditches. An excavator is used to chops trees with a guillotine grapple, trying to imitate the natural tree structure of the peatland before draining. This work can also be done with a forestry machine. In the pilot project both approaches have been used. As of November 2023, this management to restore the natural forest structure had been done in 18 peatland target areas. The remaining forest management is planned for winter 2023-2024 in six peatland target areas. So far, the experience of the pilot and the project leader, is that this is a good way to enable sustainable management of drained, unproductive forestry lands.


Figure 18. a) Excavations in the field for peatland restoration and b) use of the manual Hartijoki method in the stream restoration. This kind of restoration work starts with a hoe, a scraper to open up the impacted bottom and continue with adding and/or rearranging gravel in the streams (Photos: Antti Karppinen / Metsähallitus' Wildlife Service of Finland).
4.4.2 Organisation and involvement
The project is led by Metsähallitus Wildlife Service Finland, which is responsible for coordination of the pilot, planning the stream restorations, as well as providing dissemination materials, sharing experiences and results. They are part of the state-owned enterprise Metsähallitus which manages and protects state-owned land and water areas.
The Metsähallitus Wildlife Service is part of the public administration services together with the National parks Finland, together making up Parks & Wildlife Finland. The two organisations’ tasks include managing nature conservation areas, protecting endangered species, selling hunting and fishing permits, and conducting wilderness supervision in state-owned areas. Funding for the public administration services comes from state budget allocations and permit sales income.
The Metsähallitus Wildlife Service’s main partner in the project is Metsähallitus Forestry Ltd, which is responsible for implementing the restoration measures in the field and informing about the progress of the work to the project leader. They are a subsidiary of Metsähallitus, managing the business operations. Business activities involve the management of state-owned forests, production and sales of forest tree seeds, leasing, sales, and property development in state-owned land and water areas.
Parks and Wildlife Finland manages approximately one third of Finland's land and water resources and they are the primary landowner in the pilot watershed, so there was only a limited number of private landowners (around five), from whom permission was needed to restore the areas. The pilot project is implementing restoration activities, with the project funding, both in state-owned areas and the local landowners’ areas. To avoid conflicts of interest, the project leader discusses the methods of operation with the landowners on a case-by-case basis. The project leader reflected that such restoration is likely easier when one or a few landowners already manage almost the whole area, compared to if there were 20-30 different private landowners. Even with the limited number of landowners in this project it took some time to get official agreements in place.
In addition to the landowners, other local stakeholders were involved. The local fishers’ organization Jurmu II has contributed financially to the restoration activities in the stream watershed through income from fisheries fees collected by the area's fisheries authority.
The company contracted to do the excavation work has previously worked with the project leader and has over 10 years of expertise in peatland restoration and has demonstrated a high level of competence. These skills, according to the project leader, include understanding where it is and isn’t possible to drive the excavator and the correct technique for blocking peatland ditches. Metsähallitus have an arrangement with most of the excavation contractors they work with, that makes it possible to follow the work digitally, to see on the map where excavation is currently being done in the field, which areas that have been covered and so on.
Communication: The project is using social media and publications to make informative posts about relevant topics related to the restoration. For example, they posted on Instagram about how to do spawning area restorations and share what they are doing in this pilot project.
4.4.3 Effects of the NBS intervention – monitoring
The pilot project has already restored several hectares of peatland and km of stream (see Section 4.4.1 and Figure 19). For monitoring of the effects of the restoration of Mätäsoja, Metsähallitus is cooperating with the University of Oulu which has been collecting biological and chemical data and doing research to monitor the effects. In addition to leaf bags and algal tiles, the monitoring of the effects of the restoration activities includes: 1) water mosses, 2) benthic invertebrates, 3) whether the structures of the stream bed have been mapped to verify the morphological effects of the restoration measures, 4) the measurement of the chemical quality of the parameters used in water body monitoring (TP, TN, DOC, pH, Alk., etc.). This aims to contribute to the future development of NBS and the work is funded by the university themselves and not the pilot project.
The Natural Resource Institute Finland is also doing electrofishing, using their own funding, to evaluate the impact of restoration on brown trout populations in the stream. Initially, the state of the stream will be evaluated by data on the presence of significant fish species and their population dynamics. The full results of the restoration will take a while to show in the fish data and the same is true of invertebrate data, which is also more difficult to collect compared to fish data.


Figure 19. Restored areas before and after restoration. Peatland dries up because ditches have been dug (upper left) and the peatland has been restored by filling the ditches (upper right). The natural state of the stream has deteriorated when stones and wood have been removed from the stream (lower left) and the stream has been restored by adding boulders, stones, spawning gravel and wood (lower right). All photos: Antti Karppinen/ Metsähallitus.
There is no required ongoing maintenance needed for the restored streams and peatlands if the implemented measures are working as planned. Initial and periodic checks may be necessary to identify overly wet areas that could potentially cause any damage or e.g., harm to forestry. But overall, the project leader emphasised that there are minimal maintenance requirements. During autumn 2023 the project leader was contacted by a landowner about increased moisture level on one cabin road, potentially tied to the restoration activities. While the project anticipated some water level rise, the heavy rainfall in the weeks before, may have contributed to it rising in that specific area. The project leader noted that in such instances it is important have a dialogue with the landowner and investigate the causes. The case has been solved during a field trip with the local landowner in the problem area. One dam has now been removed with a shovel, which solved the problem.
There is no specific plan for maintenance or supplementary actions after the project period ends, but the project considers the need for Metsähallitus and the research organisations to continue their monitoring efforts beyond the project.
4.4.4 Next steps, potential for upscaling
Finland has been restoring both peatlands and streams for quite a long time, but commonly not simultaneously over an entire watershed. Metsähallitus aims to continue with this after the end of the pilot project. In the last phase, the pilot project will also develop a guide for sustainable management of forested areas and forestry land.
When it comes to further restoration work, funding like from the NBS program of the NCM is considered very important to Metsähallitus Wildlife Finland. There are still many streams and peatland areas in Finland to restore, and, according to the project leader, it is hard to find funding for this kind of work. The project leader is currently preparing some project proposals for EU funding, for continued and further restoration activities, but the competition is tough.
4.4.5 Key lessons learnt and reflections relevant for nature-based solution projects
- Early communication has contributed to effective teamwork. The collaboration between the partners has been going well because the team members already knew each other and started communicating early. Ongoing cooperation with local stakeholders, such as the university and the local fishers’ association, has also enhanced project outcomes.
- Developing the restoration plan for the area before raising funds for the practical restoration activities has been useful in this case, as planning is time-consuming. Developing the plan for the area took two to three years and was ready just when the NMC’s call for NBS pilot projects came out. Having a plan already in place from the onset has enabled the team to reach more restoration targets within the pilot project period, as the main time available could be spent on practical implementation rather than planning.
- Maintaining communication with team members and equipment operators, such as excavator operators, has been essential for the progress of the project. Keeping individuals informed and reminded about upcoming plans and target areas is a central part of the restoration activities.
- Securing sustainable funding sources is crucial, given the scale of peatland and stream restorations needed in Finland. While the NCM program has been instrumental in funding the pilot, there is a need for reliable long-term funding opportunities. The project leader stresses the need for permanent funding sources to ensure long-term success and effective planning, especially for large-scale projects.
4.5 Pilot 5: Crop wild relative biodiversity in urban green and coastal areas in Reykjavik (Iceland)

Figure 20. Populations of Carum carvi (a CWR to cultivated caraway) and Leymus arenarius (a CWR to wheat) on the island Viðey, with Reykjavik in the background (Photo: Magnus Göransson).
Project name (local language): Crop wild relative biodiversity in urban green and coastal areas in Reykjavik
Location: Reykjavik, Iceland
Duration: 1 May 2022–1 April 2024
Project leader: Reykjavik Botanic Garden
Involved actors: Reykjavik Botanic Garden is part of the Nature and parks division in the department of Environment and planning within the City of Reykjavik and leads the pilot. NordGen and Icelandic Institute of Natural History are included in the project reference group.
Budget: Total 815,000 DKK (650,000 DKK, NCM contribution)
Primary type of NBS action: Conservation and sustainable use and management of terrestrial ecosystems
Key societal challenge(s) addressed: Environmental degradation and biodiversity loss, Climate adaptation.
4.5.1 Background, concept and status
Aim: The pilot project aims to increase biodiversity and resilience of Reykjavik by conserving biodiversity and genetic resources while also making the genetic resources accessible for research, plant breeding and innovation. More specifically, the pilot aims to improve the knowledge of crop wild relatives (CWR) in a coastal urban setting (see Figure 20), collaborate with policymakers and managers in municipalities and local institutions to increase awareness and strengthen the management of CWR, and conduct a feasibility study on the concept of genetic reserves. Crop wild relatives (CWR) is a concept for wild plant species that are closely related to cultivated crops, with traits that have been lost during plant breeding (see Figure 21).
Challenge: The effects of climate change are challenging for agriculture and food production, and there is a need to develop crops that are resilient to future climate scenarios. Limited diversity in crop species decreases the potential for them to adapt to changes in climate, pests and diseases.
Concept: Many CWR are adapted to cultural landscapes and are often found where humans have historically cultivated the land, including cities built on former agricultural land. Since the CWR have adapted to the geographical area in which they grow, it is important to conserve them in their natural environment (in situ conservation). This is the aim of this pilot study.
The first step to achieving this goal is to map the distribution of CWR and then to assess threats to these populations. If threats are found, management plans will be developed together with the City of Reykjavik. Conservation in genebanks (ex situ conservation), on the other hand, is a backup option and a way to make the plants available for plant breeding and research, as well as reintroductions if the wild populations should go extinct.


Figure 21. Kale on the left, and its CWR, Capsella bursapastoris, growing in Reykjavik. (Photos by: Rasbak, CC BY-SA 3.0 DEED (left) and Magnus Göransson (right)).
Activities within the project include:
- Developing a national CWR priority list in Iceland: Several crop wild relatives have been found in Iceland (forage grasses, wheat and berries). The list will be developed and prioritized using the existing CWR priority lists for Nordic countries (Fitzgerald, et al. 2018), and through discussions with botanists and crop experts.
- Developing a CWR inventory for Reykjavik: Suitable areas within Reykjavik (islands and green areas along waterways) will be selected and inventoried for species on the national CWR priority list.
- Identification of suitable CWR populations for long-term monitoring and conservation: One or two populations in Reykjavik will be selected as case studies to investigate the feasibility of creating genetic resources for the species. Then, management plans for these species will be developed in collaboration with the municipality, aiming to conserving the genetic diversity and increase overall biodiversity (supporting pollinators and birds) while providing recreational areas.
- Feasibility study for establishing genetic reserves for specific populations: This includes assessments of local, national and international legal frameworks for regulating the access of the genetic resources in the reserve.
- Outreach to municipalities and the public throughout the project, aiming at increasing awareness of CWRs, their importance for food security and local sustainable agriculture. The project outcomes will also be communicated to relevant Nordic and European networks.
Status: As of autumn 2023, the team is in the phase of developing a CWR inventory for Reykjavik (Figure 22). The pilot has postponed publishing the national CWR priority list until after the fieldwork because they found that it would make more sense to develop the list after completing the fieldwork, so that this could concretely inform the work with the priority list. Field inventories of the crop wild relatives were carried out on 14 locations in urban areas along waterways and islands in Reykjavik municipality during the summers of 2022 and 2023 and the project team is now compiling the fieldnotes and comparing the findings with earlier inventories, which were done 40 years ago.

Figure 22. Hjörtur Þorbjörnsson from Reykjavik Botanic Garden doing field inventory of crop wild relatives (CWR) on Engey with Reykjavik in the background (Photo: Magnus Göransson).
4.5.2 Organisation and involvement
The pilot is managed by Reykjavik Botanic Garden (part of Reykjavik City) in collaboration with an independent researcher. The steering group consists of representatives from the City of Reykjavik (nature and parks division) in addition to the representative from Reykjavik Botanic Garden and the independent researcher. They also established a reference group with people from the City of Reykjavik/Ministry for the Environment and Natural Resources, NordGen and the Icelandic Institute of Natural History. The pilot was inspired by the Nordic Genetic Resource Center (NordGen), which is the joint genebank and knowledge center for genetic resources in the Nordics, funded by NCM. Several people involved in the pilot are also involved in NordGen which the pilot benefits from and vice versa.
Initially, the idea was to have regular meetings with the steering group, but the collaboration evolved in a more organic way in which the project managers reached out to people from the steering group when needed. According to the project managers, this has turned out to be a very useful way of cooperating.
As for stakeholder involvement, the project’s plan and hope is to actively involve the City of Reykjavik in creating the management plans for selected CWR species, as they are responsible for management of the green areas in Reykjavik. Increased awareness of the importance and value of CWR among these people will, according to the project manager, increase the likelihood of successful long-term conservation with the potential to last long after the project period.
The pilot has arranged several outreach activities like a travelling exhibition visiting several places in Iceland, held a talk at a conference in Reykjavik, taken part in a radio interview, and presented to the academic community at a conference in Melbourne, presented to urban planners and academia at a conference about ecology in urban areas, and a meeting with international researchers at NordGen.
The project team has experienced that people quite easily connect to the topic of food security and resilience and understand why the question is being raised and the importance of genetic diversity in this regard. They feel that the main objective of the project, which is to conserve CWR populations mainly in unmanaged nature within the municipality, is easy to communicate. At the same time, they reflect that changing people’s mindset can be challenging. An example is when they also want to plant the idea in people's minds that they can make a difference by leaving their own garden a bit messy (and weed away less of the local CWR flora) and thereby conserve both CWR and help local biodiversity (insects, plants, birds). They found that this applies not only to the public, but also to the municipal gardeners maintaining public gardens and spaces in the city.
4.5.3 Effects of the NBS intervention – monitoring
An important part of the pilot is to conduct inventories of CWRs and compare them with previous inventories (developed 40 years earlier). This is done to study species distribution ranges and to link this to any management changes for the respective area.
The subsequent activities in the pilot are aimed at conserving CWR and improving the management of areas with CWR; one or two populations of CWR will be selected as case studies and management plans for these species and locations will be developed in collaboration with municipal employees managing green areas. The effects of this will be documented. However, documenting the effects of the intervention, namely the management plans and outreach, will require new additional funding, as the funding from the NCM ends in 2024.
4.5.4 Next steps and potential for upscaling
The next steps in the pilot are to choose plant populations suitable for long-term monitoring and conservation and to publish management plans for these populations and locations. Thereafter, it will be to develop a national CWR priority list for Iceland and to conduct a feasibility study of establishing genetic reserves for these specific populations by assessing different legal frameworks for regulating the access of the genetic resources in the reserve.
The project team foresees that the management plans will improve the chances for a long-term conservation of CWR, while the assessment of the legal framework will provide a foundation for the sustainable use of the CWR genetic diversity in the future.
4.5.5 Key lessons learnt and reflections relevant for nature-based solution projects
- Securing enough funds and utilising them carefully enabled the team to spend enough time on the fieldwork, without rushing. The team experienced that doing field inventories over rather large areas is time consuming, and they were dependent on others to be able to travel to different islands. As an example, booking a designated boat and driver for their fieldwork instead of just joining another group, turned out to be very valuable.
- A reference group supporting the project enabled the team to benefit from their knowledge and network. By establishing this group in the beginning, the members were more invested in the project, and as such more likely to respond than if people not associated with the project are contacted ad-hoc at a later stage.
- Crop wild relatives have traits making them a valuable resource when breeding crops for local adaptation. By preserving these species, we secure this resource for future generations. Some of the species are seen as weeds and there is a need for a mind shift to preserve them.
4.6 Pilot 6: Protecting stream banks against erosion (Norway)

Figure 23. Gjødingelva (in Hurdal municipality) 19 April 2023 (Photo: D. Krzeminska, NIBIO).
Project name (local language): Environmentally friendly measures (NBS) for slope/stream bank stability (N4S: Naturbaserte løsninger for stabilisering av skråninger/bekkekanter)
Location: Three River Basin Sub-Districts in Norway: Hurdalsvassdraget/Vorma (Huvo), Leira-Nitelva, and Øyeren. One pilot will be in Hurdal municipality and two in Lillestrøm municipality.
Duration: 1 March 2022–31 December 2024
Project leader: Norwegian Institute of Bioeconomy Research (NIBIO)
Involved actors: County Authority of Viken (Viken FK/River Basin District): project owner and initiator. NIBIO is responsible for project management and professional assessments in the pilot. The three River Basin Sub-Districts (Hurdalsvassdraget/Vorma (Huvo), Leira-Nitelva and Øyeren) are responsible for mapping local environmental challenges and for contact with local stakeholders. The Norwegian Water Resources and Energy Directorate (NVE), the County Governor and the Norwegian Environment Agency are supporting organisations.
Budget: 900,000 DKK (NCM contribution) + self-funding from municipalities and others
Primary type of NBS action: Restoration
Key societal challenge(s) addressed: Climate change adaptation, Environmental degradation and biodiversity loss.
4.6.1 Background, concept and status
Aim: The aim of the pilot project is to address stream bank erosion and soil stability in agricultural catchments (see Figure 23), especially in response to changing hydrological pressures and adaptation to climate change. Moreover, the pilot is also expected to support biodiversity and reduce water pollution.
Challenge: Undercutting of bank toe and resulting steepening of the slope is the main cause of the streambank failures observed in agriculture catchments in Eastern Norway (Skarbøvik & Blankenberg, 2014; Skarbøvik, 2016). The triggers are either hydrological factors (snow melt, intensive/prolonged rainfall) or human activity (using heavy machinery close to the edge of streambanks, new infrastructure etc.). Stream bank erosion is a major challenge in several areas of Viken County, with damage to infrastructure on land and changing hydromorphology, fluvial processes and ecology in the watercourses.
Concept: Traditional slope reinforcement measures, including reinforcement with stones, concrete walls, gabions etc., greatly influence local environmental conditions, water quality and biodiversity. As an alternative, the Norwegian pilot aims to test a selection of vegetative structure(s) in a Norwegian context, inspired by cases in Spain and Scotland, by reinforcing the stream bank using logs with roots, local soil and gravel from the riverbed as well as planting locally sourced trees and brushes and keep existing vegetation in the riparian zone (see Figure 24).
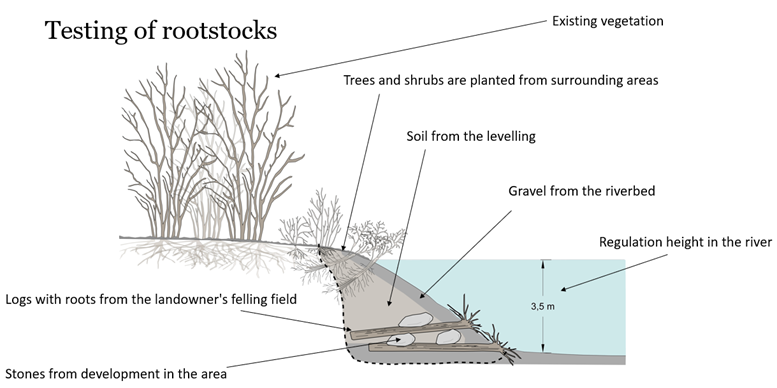
Figure 24. Testing of large wood structures is part of the pilot project (source: NIBIO).
Activities within the pilot:
- Implementation plan with guidelines and infographics: summarizing the current state of knowledge and practical experience with crib-wall structures or large wood (incl. lessons learned and best-practice, description of administrative procedures in Norway, implementation plan with guidelines, and monitoring and maintenance plan).
- Implemented and functioning measures: The implementation plan from the first activity will be followed to select three suitable locations for implementing crib-wall structures, identify a company that will build the crib-wall or large wood structures, install monitoring setup, and document the economic issues.
- Demonstration day: Organize a visit in the field and open panel discussions with key actors, addressing questions and concerns of potential stakeholders, as well as preparing dissemination and communication materials like leaflets, posters and movies demonstrating the whole operationalization process (from planning, to implementation, monitoring and maintenance).
Status: As of November 2023, the project is in the second phase. The plan is to implement a NBS structure in three different locations. A large wood structure has been implemented in Gjødingelva (Hurdal municipality) in the Hurdalsvassdraget/Vorma (Huvo) River Basin Sub-District during the spring of 2023 (see Figure 25, first location selected previously as a test site). Simultaneously, the project partners are proceeding with planning for implementation of vegetative structures, either the crib-wall or large wood, in two more locations in Lillestrøm municipality within the Øyeren and Leira-Nitelva River Basin Sub-Districts. The main cause for the delay for these two locations is unstable ground conditions. The project team is working on securing necessary applications, assessments and funding.


Figure 25. Implementation of the large wood structure in Gjødingelva (Hurdal) during the spring of 2023. To the left: excavation work, 31.3.23. To the right: planting of tree seedlings, 2.6.23. Photos: Helge B. Pedersen (Huvo).
4.6.2 Organisation and involvement
The pilot project is managed by NIBIO, a state-owned research institute, which has engaged with landowners in the catchments to identify suitable locations in which the landowners are willing to test the crib-wall or large wood structure. Engaging with the landowners, in this case the farmers, is also an important prerequisite for successful implementation and for upscaling this kind of NBS, according to the project leader, who explained that the farmers are concerned about erosion and have thoughts about how to solve these issues – and the power to implement their solution.
While funding from the NCM NBS programme covers the costs of the NIBIO team and communication and dissemination activities and materials, it does not cover physical implementation of measures. In some cases, the landowners already had secured funding for physical measures. While in others, NIBIO and the landowners collaborated on applying for funding for physical implementation, for which the landowners handed in the applications. Moreover, the project secured funding for implementing measures from, and in collaboration with, the Viken county council and the local River Basin Sub-District (Hurdalsvassdraget/Vorma).
The team involved the entrepreneur (which implemented the NBS in Gjødingelva) in the planning phase through several meetings where the team described the method, discussed several options and agreed upon the solution. Then, a machine operator and project manager from Scotland joined the first day of constructing the large wood structure along with the entrepreneur and several people from the team and partner organizations. From the second day onwards, the entrepreneur carried on by themselves.

Figure 26. The project team has also invited politicians out in the field (Photo: Helge B. Pedersen, Huvo).
4.6.3 Effects of the NBS intervention – monitoring
The project aims to conduct monitoring of biodiversity and stream bank stability before and after the restoration. Before restoration, the stream bank was about three meters high and mostly vertical along the whole stretch. After restoration, the stream bank slopes gently upwards. Thus, the stability of the stream bank will be monitored not just to document the effectiveness of implemented solution, but also to make sure to avoid more erosion.
In the remaining two locations, monitoring changes in flow patterns will be funded by another project and may provide knowledge about how the vegetative structures influence the flows in the stream. According to the project leader, while the rootstocks will give hiding places for fish, this will be hard to document.
Monitoring the pilot over time will require new funding, as the funding from the NCM ends in 2024.
4.6.4 Next steps and potential for upscaling
The pilot aims to build knowledge about crib-walls and large wood structures to stabilize stream banks in a Norwegian context. The ambition is that the implementation plan with guidelines can be used by the municipalities, project executors and as input to NVE’s technical guide, thus creating a potential for upscaling the use of crib-wall/large wood structures for stream bank stabilization.
The next steps are to implement crib-wall/large wood structures at the two remaining locations. In order to do that, the necessary applications need to be approved and funding secured. Sorting out administrative aspects like the kinds of approvals needed is an important prerequisite for implementing the NBS in this project and for others that want to do the same. The hope is that the guidance documents which will be developed in the pilot – including descriptions of the administrative procedures – will make this process easier for future projects.
4.6.5 Key lessons learnt and reflections relevant for nature-based solution projects
- Administration related to securing funding and necessary approvals was time consuming. The project experienced that it took time to identify which applications they needed to submit and whether geophysical assessments were required.
- Hydrotechnical assessments should be conducted, especially in natural streams, to learn where the current is strong or weak and thus where and how to restore the stream bank. The project team advise to secure funding for such assessments when doing stream bank restoration.
- Stakeholder involvement is a success factor, and a prerequisite, for these kinds of projects. Conventional restoration methods don’t always work in areas with sand and clay, and any measures need to be adapted to the site conditions. Thus, working with landowners and entrepreneurs among others is crucial.
- In the planning and implementation phases it proved very helpful to involve experts on the chosen technique of building large wood structures, which is a new technique in Norway. Involving people skilled in this approach helped the process of choosing the right solutions, and they shared knowledge with the entrepreneur and others (on site) on how to do it in practice.
- The main enabling factor for this pilot was the funding from NCM and the municipalities’ interest in working on this topic.
4.7 Pilot 7: Floating wetland raft system for treating sea waters (Sweden)

Figure 27. Prototype of a floating wetland raft (Photo: Initiativ Utö and alchemia-nova).
Project name: Prototype testing of a novel engineered floating wetland system in the Utö, Stockholm archipelago
Location: Utö island, Haninge municipality, Sweden
Duration: 15 May 2022–15 September 2023 (extended to November/December 2023)
Project leader: KTH Royal Institute of Technology
Involved actors:
- KTH Royal Institute of Technology leads the project, responsible for coordinating the project and monitoring the performance of the NBS pilot.
- alchemia-nova (ALCN) is an Austrian tech company on nature-based solutions responsible for design and construction of the NBS pilot system.
- Insamlingsstiftelsen Initiativ Utö is responsible for providing necessary information from the pilot site and implementation of the NBS pilot on site.
Budget: Total 928,256 DKK (897,516 DKK NCM contribution)
Primary type of NBS action: Sustainably use and manage marine ecosystems
Key societal challenge(s) addressed: Environmental degradation, Water security.
4.7.1 Background, concept and status
Aim: The aim of the pilot project is to implement the floating wetland raft system (see Figure 27) in Utö, an island southwest in the Stockholm archipelago. The artificial floating wetland raft is used to remove excess nutrients from the sea water by mimicking the functions of natural "terrestrial” wetlands. The applied technology is patented by the tech company alchemia-nova and has previously been tested and applied in full-scale to treat wastewater/greywater in Austria, Switzerland and Spain.
Challenge: The Baltic Sea has severe eutrophication problems due to nutrient accumulation through extensive nutrient inputs from catchments and internal releases of phosphorous from sediments under oxygen free conditions. The foundation Initiativ Utö was founded in 2017 to reverse negative environmental impacts on the Baltic Sea by restoring marine environments and establishing new measures, benefitting the environment and the local community.
While there already are three constructed wetlands in the Utö island, which provide water purification and nurseries for pike and perch, this pilot project aims for complimentary strategies to capture nutrients (especially phosphorus) from the marine environment. The project partners (Initiativ Utö and KTH from Sweden and alchemia-nova from Austria) started investigating nature-based solutions to treat eutrophic Baltic Sea water together in 2021. A preliminary study showed that lab-scale versions of a floating wetland raft systems could work to treat excess nutrients from the sea water. This motivated the application to the NCM pilot program.
The concept:
- The floating wetland raft is comprised of two planted basins (plants with substrates including gravel, expanded clay, and zeolite) that are aligned stepwise above each other, with a biochar tank in the back (see Figure 28).
- A solar panel installation provides energy for a water pump (feed pump) and an aeration pump/compressor which provides circulation of air to the plants.
- Water is pumped from the surrounding sea and into the inlet zone of the upper planted basin. The water then flows through the basins to provide nutrient capture through microbial communities and plant uptake. In the next step, the biochar tank captures excess nutrients.
- The nitrogen (N) and phosphorous (P) which is removed from the water and taken up by the plants and biochar can then be recovered and used for soil improvement in agriculture.
- The planted basins used on the floating wetland raft are 2 m long and 40 to 28 cm wide (the front is inclined). The water inflow is 500 L/day, but the project team thinks the maximum treatment capacity might be higher and should be tested in the future.
- The raft that the system is placed on is 6 meters long and 2 meters wide. It is not expected to cause negative disturbance to the natural environment, and fish are using them for shelter.
- Future potential development includes modifying the floating wetland raft to make it automatically mobile, allowing it to move around the Island of Utö depending on where the need for nutrient removal is the highest.
- Examples of the species and types of plants that were tested in the system are Bolboschoenus maritimus, Schoenoplectus tabernaemontani, Lythrum salicaria L., Juncus inflexus, Spartina pectinate.
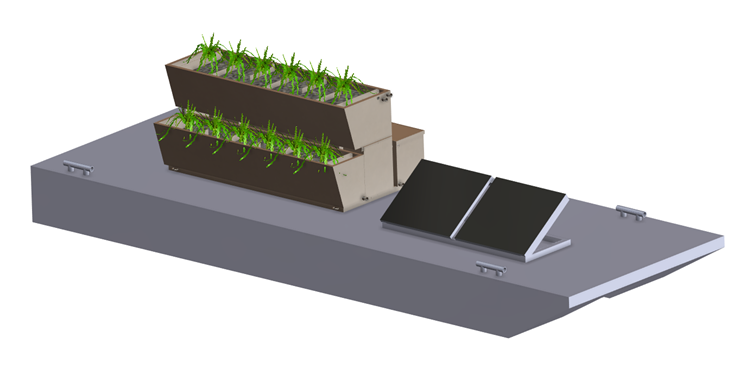
Figure 28. Illustration of the floating wetland raft concept (source: Marco Hartl, alchemia-nova).
Status: In June 2022, the project team visited the Utö island to collect water samples and identify locations for the floating wetland raft system. The first floating wetland raft was placed on site in early May 2023 and has been running there since then (Figure 29). As of October 2023, the project period has been extended from the planned end in mid-September 2023 to November/December the same year. The project will also continue monitoring the system over the coming winter at their own cost.


Figure 29. Assembling the system (Photos: Initiativ Utö and alchemia-nova).
4.7.2 Organisation and involvement
The project team consists of three different partners with complementing roles and competences. The pilot project is led by Swedish KTH Royal Institute of Technology, which is responsible for coordinating the project and monitoring the performance of the pilot. They describe themselves as the “end users” of the NBS, which was constructed by the Austrian tech company alchemia-nova (ALCN) and provide specialised NBS competence. The first small scale prototypes were therefore designed, constructed and tested in a lab in Austria.
The local foundation Initiativ Utö has been the main actor in the field and responsible for providing necessary information from the physical pilot site as well as the practical implementation and maintenance of the floating wetland raft on site. Initiativ Utö is also described by the project as “the public figure” of the partners, as they already had contacts with the local community and NGOs in the area. Their website
The project has included children and youth at project events to increase knowledge and awareness, in collaboration with the stakeholder Haninge Municipality. In September 2022 and 2023 the project arranged a two-day camp with an upper secondary school. While the pilot does not need to involve landowners for e.g. use of their land, the project is looking to inform and engage the local community, for example by placing information boards by the pilot location and by having more regular citizen engagement activities.
4.7.3 Effects of the NBS intervention – monitoring
Monitoring of the floating wetland raft system has been ongoing from the start through measuring water quality and assessing the potential for nutrient capture, in addition to visual assessment and monitoring of the system (e.g. anchoring) and plants.
Every two weeks during the summer of 2022, water samples from 1) the inlet, 2) a sampling point after two plated stages before the biochar chamber, and 3) the outlet of the system, were collected and analyzed for pH, salinity, TDS (total dissolved solids), anions and cations. In 2023, the project expanded the monitoring to the whole year at their own cost. The plant growth has been documented through videos and photos. The biochar materials saturated with nutrients will be tested in terms of nutrient capture capacity, and lab scale investigations (planned in 2024) will be carried out for their use for fertilization.
So far, the project has found that the monitoring shows that the wetlands worked well in reducing nitrogen and phosphorous during algal blooms in May–June (2023). However, the project team experienced some technical issues with the pumps on the raft during the summer of 2023. The pumps did not work properly when they were covered in algae, this is something that the project will work on to solve for future seasons.
Overall, the pilot project found that the floating wetland raft system was able to reduce N and P concentrations sufficiently during algal blooms with effluent values below the (HELCOM) eutrophication thresholds.
The plants used in the wetland were from the Baltic region, both local Swedish and other non-invasive species. The project first started with plants purchased in Austria, but they experienced that this did not work out well. Furthermore, when nutrient concentrations were lower (not during the algal bloom) the project experienced that some of the plants showed very slow growth due to nutrient starvation. On the other hand, some of the plant specialists in the wider team thought that some plants might have been exposed to a nutrient load that was too high. The project team also said that a there is a need for more sensitive measurement techniques that can detect very low phosphorus concentrations in the water, as this would help to understand the system performance better. As part of future upgrades of the system, they would like in-situ nutrient detection sensors adapted for very low nutrient concentrations and applicable for brackish/ sea water. The project is also looking into local plant types that better survive during winter conditions.
4.7.4 Next steps, potential for upscaling
The primary aim of the pilot has been to test the floating wetland raft system and to further develop the concept and functioning based on the results. Potential upscaling entails increasing the size of the floating wetland raft with capacity for cleaning more water. There are still some technical issues and potential modifications that the pilot will work more on, and larger rafts may also require other materials and design to let the sunlight go through. For future developments, the project is also thinking about making the current system more mobile, e.g. with GPS and sensor system (for on-site nutrient measurements).
The team has ambitions to continue to monitor effects after the pilot has ended and is currently looking into collaborations and funding opportunities for this. One concrete potential for upscaling to other areas that is being discussed is to collaborate with a wastewater treatment company located in Stockholm and to use the system in road runoff ponds. Another possibility is to place a raft in the Utö harbour to absorb toxic substances from the sea water there. The project is also considering testing out planting vegetables or other edible plants using the nutrient-rich biochar collected from the biochar tank of the floating wetland raft in the future.
A key success factor of this system is its ability to reduce nutrient concentrations in the sea water. The ambition is that the pilot can provide a model for a sustainable solution to reduce eutrophication in the Baltic Sea that can be adapted and used in the Nordic region and in other water bodies. As such, the project also aims to influence policies and convince governmental institutions to scale up. Considering policies, according to the project team, the requirements and permissions needed for the floating wetland rafts are still somewhat unclear. Within the team, there is local knowledge on such processes, but for others to be able to follow this information should be made more accessible.
4.7.5 Key lessons learnt and reflections relevant for nature-based solution projects
- Diligent planning is important, including securing a contract and solving aspects related to intellectual property (IP) of the technologies and methods to be used. This took considerable time in the start-up phase of the pilot project. With a relatively short project period, the team experienced that substantial resources and costs went into project planning and setting up the system, rather than actual implementation in the field. The project leader therefore recommends looking into such aspects and questions as early as possible, as the start of the project depends on contracts being in place.
- A project team with the “right combination of people” has been a key enabling factor for the project. This is meant both in terms of appropriate and complementary competencies and good communication within the project group, as well as having dedicated roles among the project partners.
- Local plants are probably more robust and better suited to be used in the floating wetland raft system, as the project found that non-native plants used in the system were struggling.
4.8 Pilot 8: Establishing multifunctional wetlands in agricultural areas (Åland)

Figure 30. Restoration for better wetland function in agricultural land in Åland (Photo: Ålands Vatten).
Project name (local language): ultifunctional wetlands for water quality, sustainable food production, climate adaptation and biodiversity - nature-based solutions and ecosystem services in Åland in the Baltic Sea (Multifunktionella våtmarker för vattenkvalitet, hållbar livsmedelsproduktion, klimatanpassning och biologisk mångfald – naturbaserade lösningar och ekosystemtjänster mitt i Östersjön).
Location: Åland
Duration: 1 April 2022–31 January 2024 / extended until 31 December 2024
Project leader: Ålands Vatten Ab
Involved actors: Ålands Vatten Ab, a publicly owned drinking water company in Åland is leading and managing the pilot project.
The Project steering group have members representing Åbo Akademi University, Åland University of applied sciences, Turku University of Applied Sciences’ (Åbo Yrkeshögskola) department for engineering and business, and RI.SE Research Institutes of Sweden’s department for Urban Water Management.
The Project Reference group members represent the Government of Åland’s Environmental Agency and the water protection project Raseborgs Å.
Budget: Total 1,267,200 DKK (852,200 DKK, NCM contribution)
Primary type of NBS action: Conservation, Restoration, Sustainable use of resources
Key societal challenge(s) aimed to address: Water security, Environmental degradation and biodiversity loss, Climate change adaptation.
4.8.1 Background, concept and status
Aims: The pilot project aims to restore one and create two new multifunctional wetlands for better water quality, sustainable food production, climate adaptation and increased biodiversity (see Figure 30). The wetlands are expected to have benefits for the aquatic environment, drinking water supply, sustainable food production, climate mitigation and adaptation and biodiversity.
Challenge: Agriculture and human activities have large impacts on water quality and ecosystems. Due to low water quality in the Åland Water raw water reservoirs in the 1980s, three water protection areas were established. While the quality increased over the subsequent decade, the water bodies started deteriorating again in the 2000s. The publicly owned water company, Ålands Vatten Ab, supplies drinking water to about 75 per cent of Åland's population. Since 2015, the company has intensified its work for sustainable drinking water supply and water protection - a strategy that is linked to Åland's development and sustainability agenda. An investigation in 2017 showed that the nutrient loads in several lakes were very high, with agriculture being the largest source.
Concept: The concept is to establish different types of multi-functional wetlands through restoration in agricultural areas in main Åland, which is the largest island of Åland. Multifunctional wetlands may contribute to reduced flooding and more stable access to irrigation water for farmers. Higher raw water quality for drinking water supply would also require less energy and reduced chemicals for purification. It is expected that the wetlands and ponds can provide habitats for protected species such as small and large water salamanders, as well as frogs, insects and birds.
Status: Three locations in Åttböle/Markusböle, Prästgårdsnäset and lake Finnbacka have been selected for wetland creation and restoration in the pilot project (see Figure 31 and Figure 32). They are all part of the lake Markusbölefjärden catchment area which is a drinking water reservoir. The project started in 2022 with meetings and visits to the sites where restoration of wetlands was considered. At the same time, a procurement process began as external expertise was enlisted to assist in the work. A consultant helped with developing the plans and a contractor was engaged for the on-site excavation and restoration work. The plans for the three areas have been finalized at different times. Once the plans were ready, they were presented to the project steering group and local landowners for inputs and feedback before the field interventions could start. Recently it has been decided to develop the plan for Finnbacka träsk further.
As of October 2023, one of the planned wetlands has been created. The plan and status for the three locations are:
- Åttböle: Establish a multifunctional wetland/combi pond
for irrigation water and additional retention of water to prevent flooding and runoff during high rainfall events (see Figure 31). The planned wetland area is 0,55 hectare with a maximum depth of 1,1 meter, with a volume of approx. 5000 m3 of water. The land is privately owned by a local fruit and berry farmer who needs more water for irrigation. The multifunctional wetland was constructed in the summer of 2023 and will continue to be developed in 2024, by improved availability and measures to improve biodiversity.
- Finnbacka träsk: Improve the wetland function in and around the lake and the adjacent wetland to improve water retention capacity. The aim is to improve the availability of water for irrigation and at the same time reduce risk of floods and nutrient runoff. The plan is developed in the autumn of 2023 in collaboration with an Estonian company. As of November 2023, the work is in progress, and the plan is to finalize the restoration during 2024.
- Prästgårdsnäset: Establish a multifunctional wetland to prevent runoff and improve the conditions for agricultural production of the nearby areas. There are cows grazing in the area, and to prevent them from going into the raw water, an additional pond where cows can drink is planned. The plan was finalized in 2023. In November 2023, the landowner (Northern Åland church) is processing the request from Ålands Vatten. Ålands Vatten has also approached the Åland Government about the potential for increased cooperation and funding in this location.


Figure 31. Location for a multifunctional wetland/combi pond in Åttböle (left). Excavation contractor, project leader and landowner in from of the newly established wetland in Åttböle (right) (Photos: aerial photo, Ålands Vatten).


Figure 32. Activities in one of the pilot projects sites (Photos: Ålands Vatten).
4.8.2 Organisation and involvement
The project is run by Ålands Vatten Ab. A steering group has been established to monitor whether goals and deliverables have been achieved. The group consists of contacts from other projects and relevant stakeholders, such as Turku University of applied sciences, and from a Finnish project on environmental measures in agriculture named Raseborgs å, as well as RISE in Sweden. It is highlighted by the project leader that it is valuable to include both representatives from Sweden and Finland in such projects in Åland.
Ålands Vatten Ab is a drinking water company owned by the Åland government and eight municipalities, including Mariehamns stad. They have worked on environmental measures related to water quality and runoff from agricultural areas for several years and have experience with one wetland restoration and construction before this pilot project.
Communication: The project leader has been responsible for most of the communication activities in the project but has also engaged a communication agency. They helped to build an information website called the “wetland web” (Våtmarkswebben) which has been established under Ålands Vatten Ab’s website , vattenskydd.ax, as part of this project (see Figure 33).
How messages are communicated and framed is important, for example, the project leader makes the message more positive by talking about “retaining nutrients in the ground” rather than talking about “nutrient leakage”. The project also experienced that highlighting the connection between local measures and positive effects on the Baltic Sea has created engagement and interest in the pilot work.

Figure 33. Poster about the wetland web, “Våtmarkswebben” (Photo: Ålands Vatten).
Collaboration and operations: The project has experienced challenges related to finding the right external expertise and competence, and it has taken time to establish contact. According to the pilot project leader, the demand for restoration and NBS consultancy services is very high, which is driving prices up and it has been a challenge to find someone who can do the job at a price that is within the project budget. The planning of the wetland restoration has been carried out by a now retired consultant. The entrepreneur was selected by a procurement process.
The cooperation between Ålands Vatten and local farmers has been a key part of the project. Land ownership is a strong right in Åland, and cooperation with landowners is important for the restoration activities. The landowners keep the right to the land and they enter into an agreement with the project before any work is done in the field. The project leader highlighted that having experience working with these issues has been important for establishing the relationships and agreements with landowners in the selected areas. Cooperation and communication were mentioned as essential factors for addressing potential conflicts of interest.
The maintenance work related to the restored wetlands is expected to vary for the different areas and may be the responsibility of Ålands Vatten for some, while in other cases the landowners will according to the agreement take over responsibility for the maintenance. In terms of making agricultural land available for wetland restoration, the two landowners that are private farmers are also in need of (more) water for irrigation in the future. The wetlands are expected to contribute to more stable access to irrigation water, so it is assumed to be beneficial for the farmers. In the third area, the landowner is a church which is renting out the land to a farmer. The flooded parts of the area are no longer used for agricultural production, and therefore not included in the farmers’ lease. For this wetland, the project leader says a collaboration between the water company, the landowner and the Åland government is needed, since the area is close to a nature reserve. This also has implications for the maintenance that will probably be handled by the property board (Fastighetsverket) that also takes care of the nature reserve.
4.8.3 Effects of the NBS intervention – monitoring
During field visits to the different restoration locations in 2022 the state of the areas was documented by photography, video and drone images. Additional documentation was obtained from GPS data, GIS and satellite images and old drainage maps (maps showing old ditches and field drainage.)
The pilot has defined milestones and desired results for the project, but not specific indicators to assess. The monitoring is mainly done by Ålands Vatten and they are testing out different solutions to see what works. For example, when choosing the type of seeds for the wetland area, there were different recommendations from other projects, advisors and consultants about which seeds to use.
For the water company, having higher quality raw water for the drinking water supply would require less energy consumption and less chemicals for the purification process. The aim is that all three planned wetlands will contribute to better water quality in the drinking water reservoir, as they are part of its catchment. The pilot project does not have a budget for “scientific monitoring”, such as analysing water samples, and there is also a challenge to define where such samples should have been taken to effectively show results before and after restoration.
It is expected that the restored wetlands and ponds can provide habitats for protected species such as water salamanders, as well as frogs, insects, and birds. There is a plan to follow up the monitoring of biodiversity in the future. At the project end, environmental benefits, working methods and cooperation process will be evaluated by the project team with the aim of providing good examples and learning points for other similar initiatives.
4.8.4 Next steps, potential for upscaling
Two of the three planned pilot wetland restorations are still waiting to be implemented and are planned for 2024. Before the next phase of restoration or construction, a new procurement process will be conducted. According to the pilot manager, the current budget will not cover all planned activities.
The project plans to share more information about the practical implementation of wetland restoration and construction and will continue to develop the wetland web. In addition, the pilot may cooperate with a vocational college in Finland to develop a handbook for wetland restoration and construction.
Åland Vatten also aims to keep seeking different funding opportunities and taking on new projects related to wetlands, restoration of ditches and improving water retention capacity etc. The project leader highlighted that it should be an ambition for Åland to increasingly apply for Nordic project funds. The project leader is also advocating for a program of measures for each of Åland's water bodies and is encouraging the Åland government to address this.
4.8.5 Key lessons learnt and reflections from relevant for nature-based solution projects
- Stability and conditions for long-term thinking are highlighted as important enabling factors in the project. This covers several aspects, such as planning, who will be involved in running the project, and funding opportunities. It was highlighted that up-front payments of funding have been important to ensure predictability for the pilot project.
- Exchanging knowledge and experiences with other similar projects is also important, as well as a project team that communicates well and is working toward the same goals. Creating networks and enabling exchange of experience is emphasized by the pilot as valuable for future success with NBS implementation.
- Well-established relationships and communication with authorities is key to understanding the legal frameworks and applying for the necessary permits to implement the NBS.
- Each process often takes more time than expected, and it is difficult to plan for and leave enough contingency time for unforeseen events, such as weather and ground conditions that can lead to delays. Also, the dialogue and time for mutual understanding and agreement with landowners and other important parties has demanded even more time than foreseen when planning the project. A certain level of flexibility in the project plan related to the actual implementation is therefore useful.
- More education and courses for contractors and constructors who are building and restoring wetlands are needed. Considering the high demand for the right competence and knowledge of NBS and restoration, the project leader also calls for more focus on this in higher education.
- Every place is unique, and it is key to visit the locations and establish dialogue with local stakeholders and landowners when planning and implementing NBS.